Robôs humanoides aprendem parkour e executam movimentos com agilidade semelhante à humana
Pesquisadores da Amazon Frontier AI & Robotics (FAR) e da Universidade da Califórnia em Berkeley (UC Berkeley) desenvolveram um novo sistema de inteligência artificial que permite a robôs humanoides executar movimentos complexos de parkour, como saltar obstáculos, escalar estruturas e atravessar terrenos irregulares, com agilidade próxima à de humanos. O avanço representa um passo importante para tornar esses robôs mais capazes de operar em ambientes reais e imprevisíveis.
Robôs humanoides, projetados com corpo semelhante ao humano, são considerados candidatos promissores para realizar tarefas em ambientes construídos para pessoas, como fábricas, armazéns ou áreas de resgate. Nos últimos anos, engenheiros e cientistas da computação vêm tentando ampliar suas capacidades motoras e melhorar a forma como eles se movem e interagem com o ambiente ao redor.
No novo trabalho, os pesquisadores criaram um sistema chamado Perceptive Humanoid Parkour (PHP), que combina visão computacional, aprendizado por reforço e técnicas de correspondência de movimento humano. O método permite que o robô perceba obstáculos à frente e escolha automaticamente a melhor forma de superá-los, como, por exemplo, subir, saltar, passar por cima ou contornar um objeto.
Para isso, os cientistas utilizaram dados de movimentos humanos e os transformaram em sequências que o robô consegue executar. Em seguida, algoritmos de aprendizado por reforço treinaram o sistema para reproduzir esses movimentos de forma robusta, ajustando-se às condições do ambiente em tempo real. O resultado é uma política de controle única capaz de coordenar vários tipos de habilidades motoras.
Em testes com um robô humanoide real, o sistema demonstrou habilidades impressionantes: subir obstáculos com altura equivalente a cerca de 96% da altura do próprio robô, atravessar percursos com múltiplos obstáculos e adaptar seus movimentos mesmo quando o ambiente muda inesperadamente.
Segundo os pesquisadores, tecnologias desse tipo podem ser fundamentais para o uso de robôs em ambientes complexos e dinâmicos, como áreas de desastre, canteiros de obras ou missões de busca e resgate. A capacidade de se mover com agilidade em terrenos variados ainda é um dos maiores desafios da robótica humanoide e avanços como esse ajudam a aproximar essas máquinas da mobilidade humana.
Fontes
FADELLI, I. Humanoid robots master parkour and acquire human-like agility. TechXplore, 05 mar. 2026. Disponível em: https://techxplore.com/news/2026-03-humanoid-robots-master-parkour-human.html. Acesso em: 11 mar. 2026.
WU, Z. et al. Perceptive Humanoid Parkour: Chaining Dynamic Human Skills via Motion Matching. arXiv, 2026. Disponível em: https://arxiv.org/abs/2602.15827. Acesso em: 11 mar. 2026.
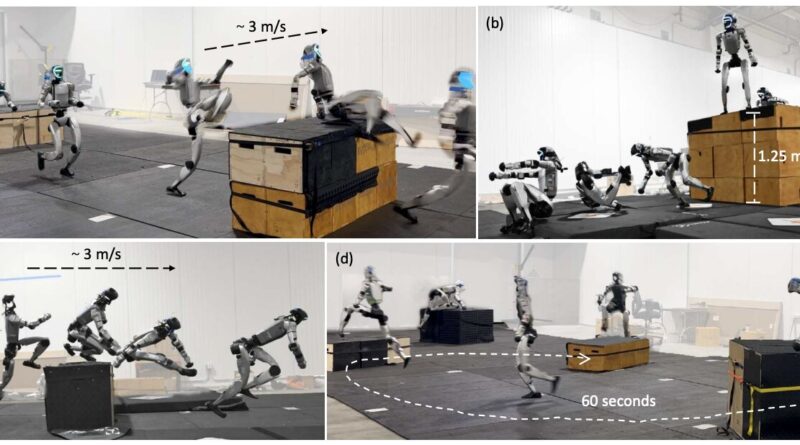
Imagem da Capa: Perceptive Humanoid Parkour (PHP) permite que um robô humanoide Unitree G1 execute comportamentos de parkour altamente dinâmicos e de longa duração utilizando percepção embarcada. Ao combinar diversas habilidades humanas ágeis por meio de correspondência de movimento (motion matching) e de um pipeline de treinamento professor-aluno, treinamos uma única política visuomotora multihabilidades capaz de realizar manobras complexas com múltiplos contatos, incluindo: (a) realizar um cat-vault sobre um obstáculo baixo seguido de um dash-vault sobre um obstáculo mais alto a aproximadamente 3 m/s; (b) escalar um muro de 1,25 m (96% da altura do robô) e descer rolando; (c) executar um speed-vault sobre um obstáculo a aproximadamente 3 m/s; e (d) atravessar continuamente, por 60 segundos, um percurso complexo de parkour com seleção autônoma de habilidades e transições suaves entre movimentos. Crédito: Wu et al.